篇名:Maritime Target Detection Based on Electronic Image Stabilization Technology of Shipborne Camera
作者:Xiongfei Shan, Mingyang Pan, Depeng Zhao, Deqiang Wang, Feng-Jang Hwang, Chi-Hua Chen(陈志华)
来源:IEICE Transactions on Information and Systems
年份:2021
DOI: 10.1587/transinf.2020EDP7192
文章摘要:
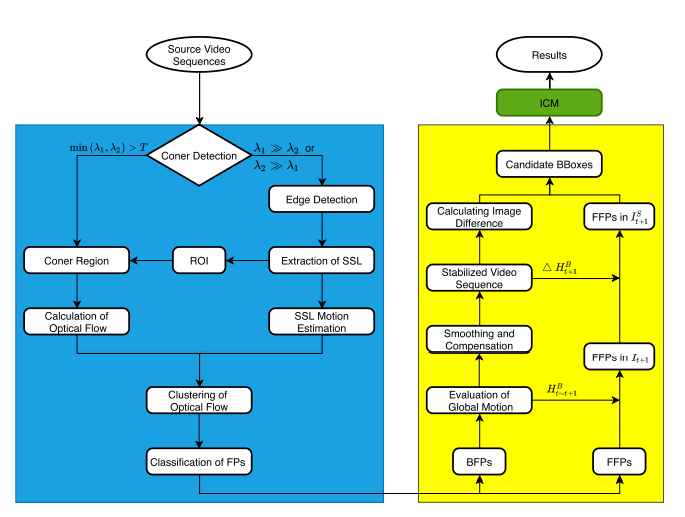
During the detection of maritime targets, the jitter of the shipborne camera usually causes the video instability and the false or missed detection of targets. Aimed at tackling this problem, a novel algorithm for maritime target detection based on the electronic image stabilization technology is proposed in this study. The algorithm mainly includes three models, namely the points line model (PLM), the points classification model (PCM), and the image classification model (ICM). The feature points (FPs) are firstly classified by the PLM, and stable videos as well as target contours are obtained by the PCM. Then the smallest bounding rectangles of the target contours generated as the candidate bounding boxes (bboxes) are sent to the ICM for classification. In the experiments, the ICM, which is constructed based on the convolutional neural network (CNN), is trained and its effectiveness is verified. Our experimental results demonstrate that the proposed algorithm outperformed the benchmark models in all the common metrics including the mean square error (MSE), peak signal to noise ratio (PSNR), structural similarity index (SSIM), and mean average precision (mAP) by at least -47.87%, 8.66%, 6.94%, and 5.75%, respectively. The proposed algorithm is superior to the state-of-the-art techniques in both the image stabilization and target ship detection, which provides reliable technical support for the visual development of unmanned ships.
在海上目标检测过程中,舰载摄像机的抖动通常会导致视频不稳定和目标误检或漏检。针对这一问题,本文提出了一种基于电子稳像技术的海上目标检测新算法。该算法主要包括三个模型,即点线模型(PLM)、点分类模型(PCM)和图像分类模型(ICM)。首先利用PLM对特征点(FPs)进行分类,通过PCM获得稳定的视频和目标轮廓。然后将生成的目标轮廓的最小边界矩形作为候选边界框(bboxes)发送到ICM进行分类。在实验中,对基于卷积神经网络(CNN)构建的ICM进行了训练,并验证了其有效性。我们的实验结果表明,该算法在包括均方误差(MSE)、峰值信噪比(PSNR)、结构相似性指数(SSIM)和平均精度(mAP)在内的所有常用指标上均优于基准模型,分别为-47.87%、8.66%、6.94%和5.75%。该算法在图像稳定和目标船检测方面均优于现有技术,为无人驾驶船舶的视觉开发提供了可靠的技术支持。