篇名:Visual Recognition Based on Deep Learning for Navigation Mark Classification
作者:Mingyang Pan, Yisai Liu, Jiayi Cao, Yu Li, Chao Li, Chi-Hua Chen*(陈志华)
来源:IEEE Access
年份:2020
DOI:10.1109/ACCESS.2020.2973856
文章摘要:
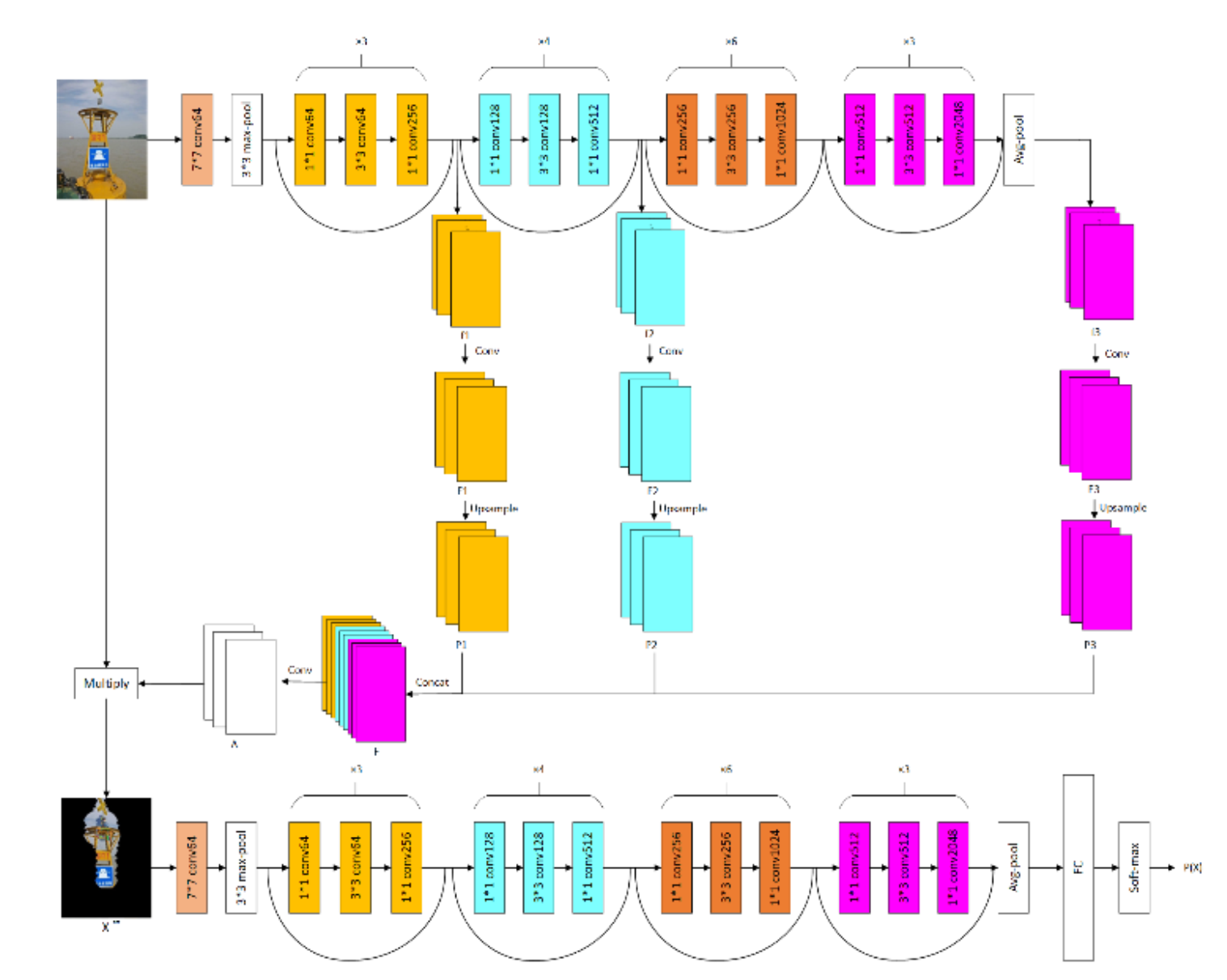
Recognizing objects from camera images is an important field for researching smart ships and intelligent navigation. In sea transportation, navigation marks indicating the features of navigational environments (e.g. channels, special areas, wrecks, etc.) are focused in this paper. A fine-grained classification model named RMA (ResNet-Multiscale-Attention) based on deep learning is proposed to analyse the subtle and local differences among navigation mark types for the recognition of navigation marks. In the RMA model, an attention mechanism based on the fusion of feature maps with three scales is proposed to locate attention regions and capture discriminative characters that are important to distinguish the slight differences among similar navigation marks. Experimental results on a dataset with 10260 navigation mark images showed that the RMA has an accuracy about 96% to classify 42 types of navigation marks, and the RMA is better than ResNet-50 model with which the accuracy is about 94%. The visualization analyses showed that the RMA model can extract the attention regions and the characters of navigation marks.
从摄像机图像中识别目标是研究智能船舶和智能导航的一个重要领域。在海上运输中,航行标志是指航行环境(如航道、特殊区域、沉船等)的特征。提出了一种基于深度学习的细粒度分类模型RMA(ResNet Multiscale Attention),用于分析导航标记类型之间的细微差异和局部差异,以实现导航标记的识别。在RMA模型中,提出了一种基于三尺度特征地图融合的注意机制,用于定位注意区域并捕获识别特征,这些特征对于区分相似导航标记之间的细微差异非常重要。在10260幅航标图像数据集上的实验结果表明,RMA对42种航标类型的分类准确率约为96%,优于ResNet-50模型,其准确率约为94%。可视化分析表明,RMA模型能够提取出航标的注意区域和特征。